Tehnologia robotică a făcut pași importanți în domenii precum industria auto, medicină sau spațiu, însă rămâne surprinzător de ineficientă în activități cotidiene aparent simple pentru oameni, precum împăturirea hainelor. Într-un domeniu în plină dezvoltare, plierea vestimentației reprezintă un punct dificil ce reflectă limitele actuale ale inteligenței artificiale și roboticii, evidențiind cât de mult mai au de învățat pentru a replica dexteritatea umană.
Provocarea reală: materialele flexibile și imprevizibile
Dacă pentru robotici procesul de a manipula obiecte dure precum șuruburi sau componente industriale a fost aproape complet învățat, manipularea țesăturilor rămâne un obstacol major. Materialele textile sunt maleabile și deformează constant, ceea ce complică procesul de prindere și împăturire. O bluză de bumbac, o cămașă de mătase sau un hanorac voluminos nu pot fi tratate identic, fiind dificil să se stabilească precis punctele de prindere sau mărimea exactă a fiecărui articol, mai ales în timp real.
Pentru mașini, diferența constă în percepție. În mod natural, ființele umane percep textura, densitatea și flexibilitatea materialului cu o intuiție fină, adaptând automat forța și direcția de mișcare. Roboții, pe de altă parte, se bazează pe senzori și algoritmi complicati pentru a interpreta aceste caracteristici, dar schimbările neașteptate sau deformările rapide pot duce la erori semnificative. Astfel, ceea ce pare un simplu gest pentru om devine o provocare tehnologică, uneori dificilă de gestionat pentru sistemele automate.
Senzori, algoritmi și limitele lor
După câțiva ani de cercetări, cele mai avansate prototipuri de roboți au început să folosească recunoaștere vizuală pentru a localiza punctele de prindere și a iniția mișcări predefinite. Problemele apar însă când materialele textile se deformează neprevăzut față de modelele inițiale, rezultând plieri inexacte sau chiar greșite. Unul dintre cei mai recunoscuți cercetători din domeniu afirmă că un robot poate eșua tocmai pentru că „țesătura se deformează într-un mod neanticipat față de modelele pe care robotul a fost instruit”.
Există și metode alternative, precum segmentarea procesului în micro-mișcări secvențiale, ce permit roboților să ajusteze pașii pe parcurs, reducând astfel rata erorilor. Deși aceste tehnici reprezintă un pas înainte, ele nu elimină complet dificultățile, fiind încă departe de a înlocui perfect manipularea umană.
De la prototipuri la casă: cât mai e până la normalitate?
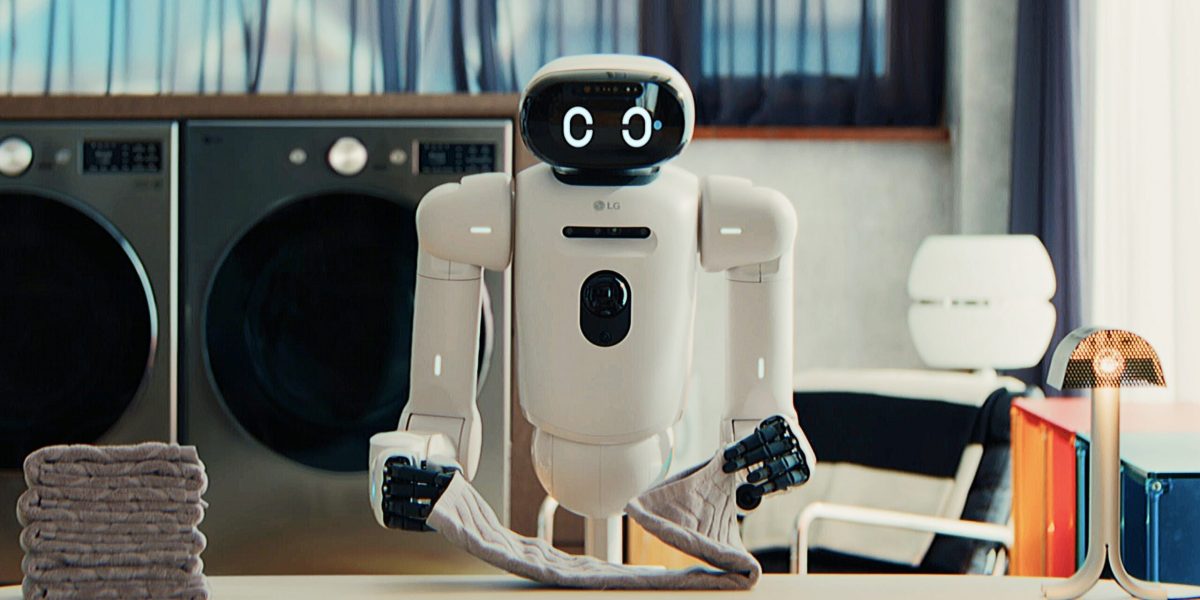
În ultimele ani, mari companii tehnologice precum LG au prezentat la expoziții internaționale prototipuri de roboți umanoizi capabili să îndeplinească diverse activități casnice, inclusiv împăturirea hainelor. Totuși, demonstrațiile practice relevă un fapt clar: tehnologia actuală nu poate ține pasul cu dexteritatea și adaptabilitatea umană. În timp ce roboții pot interpreta vizual și executa mișcări preconcepute, complexitatea variabilelor textile depășește încă limitele sistemelor existente.
Progresele din domeniul inteligenței artificiale, în special în învățarea automată și recunoașterea vizuală, păstrează însă speranța că aceste obstacole vor fi depășite în următorii ani. Cercetătorii anticipă că integrarea unor senzori de ultimă generație și algoritmi din ce în ce mai flexibili ar putea accelera dezvoltarea roboților capabili să manipuleze obiecte flexibile cu o precizie comparabilă celei umane.
Un reper pentru limitele inteligenței artificiale
Actul de a plia haine, aparent banal, devine în realitate un barometru al performanței tehnologiei. Ceea ce pentru fiecare dintre noi reprezintă o activitate naturală și automată, pentru roboți necesită o coordonare complexă a percepției, motricității și adaptării la mediu. Până în momentul în care roboții vor putea organiza fără efort o mormană dezordonată de haine într-un teanc perfect, această sarcină va continua să fie un test pentru limitele actuale ale inteligenței artificiale. Și, implicit, un indicator clar al zonelor în care tehnologia trebuie încă să își demonstreze progresul.
Sursa: Mediafax